







Inspire Robots 5-Finger Robotic Dexterous Hand - RH56E2 (RH56DFTP for Unitree G1, H2 Humanoid Robot)

RH56E2 — Key Specifications
Control & Electrical
-
Control interface: RS485 / CAN / Modbus TCP
-
Operating voltage: 24 V ±10%
-
Quiescent current: 0.25 A
-
Peak current: 4 A
Mechanical
-
Finger configuration: 5-finger anthropomorphic hand
-
Degrees of freedom (DOF): 6
-
Number of joints: 12
Physical
-
Weight: 790 ± 10 g
-
Available versions: Left or right hand
Accuracy & Force
-
Repeatability: ±0.20 mm
-
Thumb fingertip strength: 30 N
-
Finger fingertip strength: 28 N
-
Force resolution: ±0.05 N
Motion Performance
-
Thumb lateral rotation range: 75° – 170°
-
Thumb lateral rotation speed: >130°/s
-
Thumb flexion speed: >130°/s
-
Four-finger flexion speed: >200°/s
Sensors
-
Force sensors: 6
-
Tactile sensors: 5/ 17 depending on configuration
-
Tactile sensing range: 0–30 N
-
Tactile sensor accuracy: ≤5% FS
Other
-
Maximum fingertip pressure: 8 kg
-
Hand closing time: ~0.8 s
Key Features
-
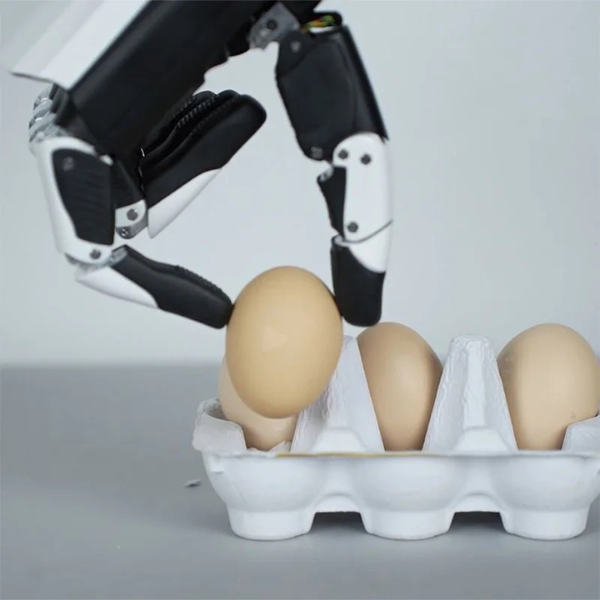
Integrated multi-point tactile sensing (up to 17 sensors) for grasp feedback
-
High-precision force control and manipulation
-
Designed for humanoid robots, AI research, manipulation experiments, and robotic arms