

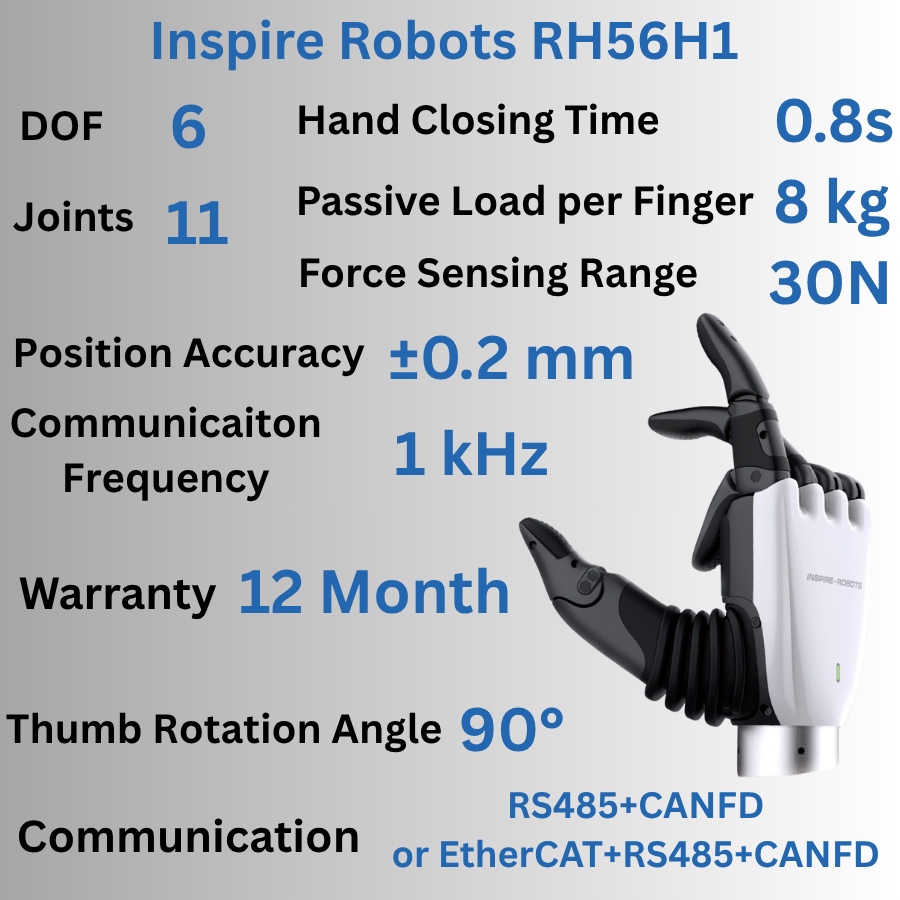

Inspire Robots 5-Finger Robotic Dexterous Hand with Tactile Sensors - RH56H1
Communication Interface:RS485+CANFD
Hand:Left
Specifications
| Model | RH56H1 Series |
| Communication Interface | RS485+CANFD or EtherCAT+RS485+CANFD |
| Degrees of Freedom (DOF) | 6 |
| Number of Joints | 11 |
| Weight | 470 ± 10 g |
| Operating Voltage | 24V – 48V |
| Max Current | 5A @ 24V |
| Idle Current | 160 ± 20 mA |
| Position Accuracy | ±0.2 mm |
| Finger Rotation Range | 75° – 165° |
| Closing Time | ≤ 0.8 s |
| Thumb Max Force | ≥ 15 N |
| Four-Finger Force | ≥ 10 N |
| Static Load Capacity | 8 kg |
| Control Frequency | 1 kHz |
| Finger Tactile Sensors | 170 (34 per finger) |
| Palm Tactile Sensors | 90 |
