






myGripper H100: 3-Finger Force-Controlled Dexterous Gripper for Pro 630/Mercury Series - Enabling Flexible and Precise Handling

The myGripper H100 is a three-finger dexterous robotic hand developed by Elephant Robotics specifically designed for applications in robotics research, education, and other related scenarios. It can be used for myCobot Pro 630 and Mercury Series. Equipped with 6 high performance digital servo motors, the H100 enables multi-parameter control, including output torque, motion speed, and absolute position. It supports high-frequency 100Hz communication, allowing real-time status monitoring during grasping operations, fully meeting the data collection needs of research environments.
myGripper H100 Video
Application Scenarios

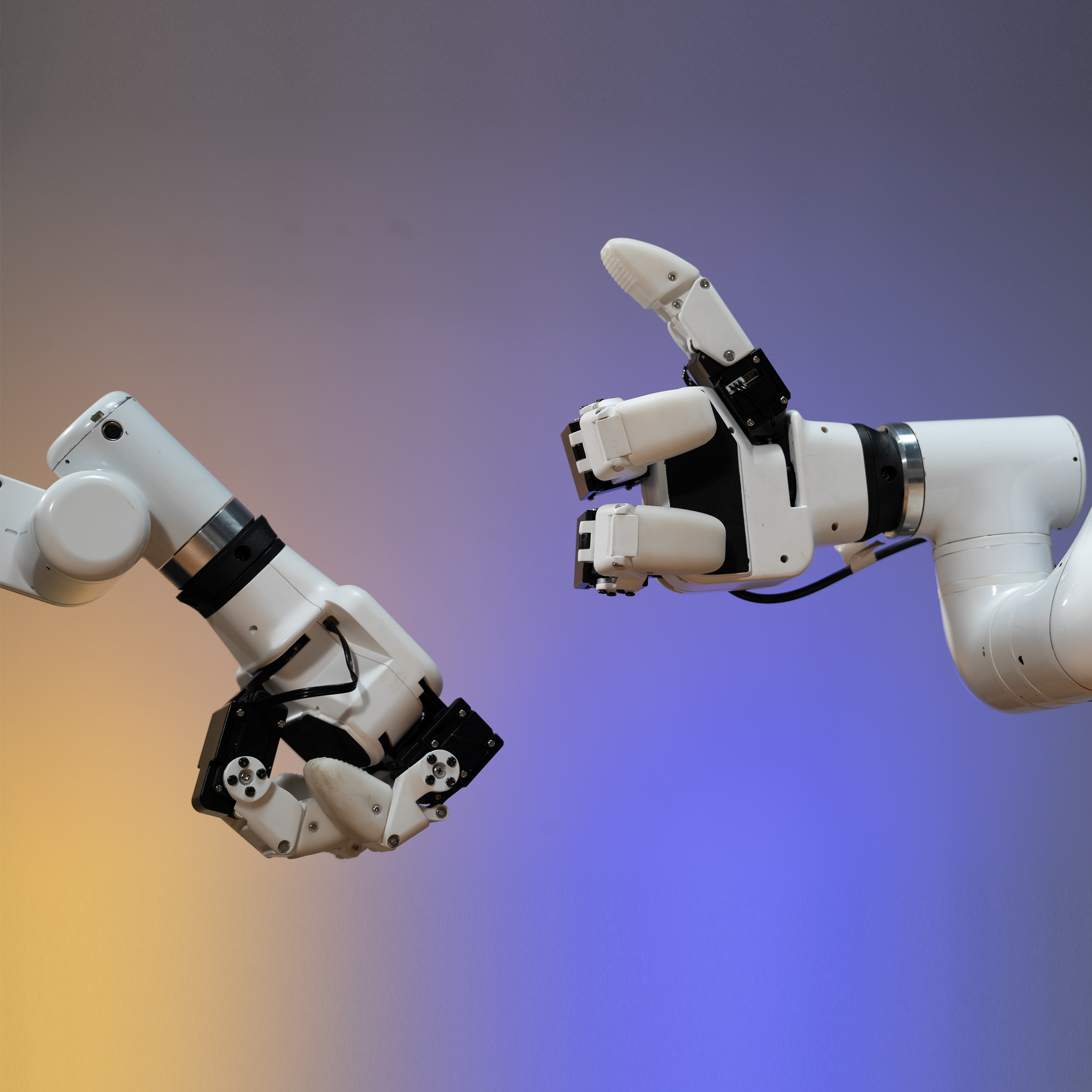
Gestural Interaction
Enables actions such as giving a thumbs-up, waving, and gesture control in collaboration with robots.

Precise Gripping
Capable of handling various objects, including fruits, food, tools, and equipment.

Experimental Operations
Performs precision tasks and demonstrations in laboratory settings.

Teaching Demonstrations
Ideal for hands-on learning in robotics courses.
Product Highlights

Product Package
| What's Included? | Three-Finger Dexterous Hand *1 |
|---|---|
| Dual-Head 8-Pin Aviation Connector Cable *1 | |
| Extension Cable *1 | |
| USB to 485 Module *1 | |
| 8-Pin Aviation Connector with 2m Extension Cable *1 | |
| USB Data Cable *1 |
Software Programming
The myGripper H100 offers a standardized robot driver library that can be easily downloaded and installed via PyPI. It supports querying joint angles, encoder positions, speed data, and more. Compatible with both ROS1 and ROS2, it includes support for the RVIZ simulation environment, allowing users to display the robot arm's state and collect real-time data.

Product Parameters
| Name | myGripper H100 | ||||
|---|---|---|---|---|---|
| Payload | 500g | ||||
| Self-Weight | 780g | ||||
| Stroke (Diameter) | 0 ¨C 130mm | ||||
| Motion Speed | 60 degrees per second per joint | ||||
| Number of Fingers | 3 fingers (corresponding to the human thumb, index finger, and ring finger) | ||||
| Movable Joints | 6 | ||||
| Motor Type | Servo motor supporting current, position, and speed control | ||||
| Lifespan | 1,000,000 cycles or more | ||||
| Electrical Interface | M8 Pin aviation connector | ||||
| Power Parameters | 24V, 2A | ||||
| Communication Interface | RS485 | ||||
| Communication Speed | Above 50Hz | ||||
| Data Format | Hexadecimal (Hex), 8N1 | ||||
| Protocol Type | MODBUS | ||||
| Programming Language | Python | ||||
| Main Control Chip | ESP32 | ||||
| Main Control Parameters | 240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, dual-mode Bluetooth | ||||
| Compatible Models |
|
||||
| Recommended Control Methods |
|