Inspire Robots Dexterous Hands Selection Guide
| Product Image |

|

|

|

|

|

|
|---|---|---|---|---|---|---|
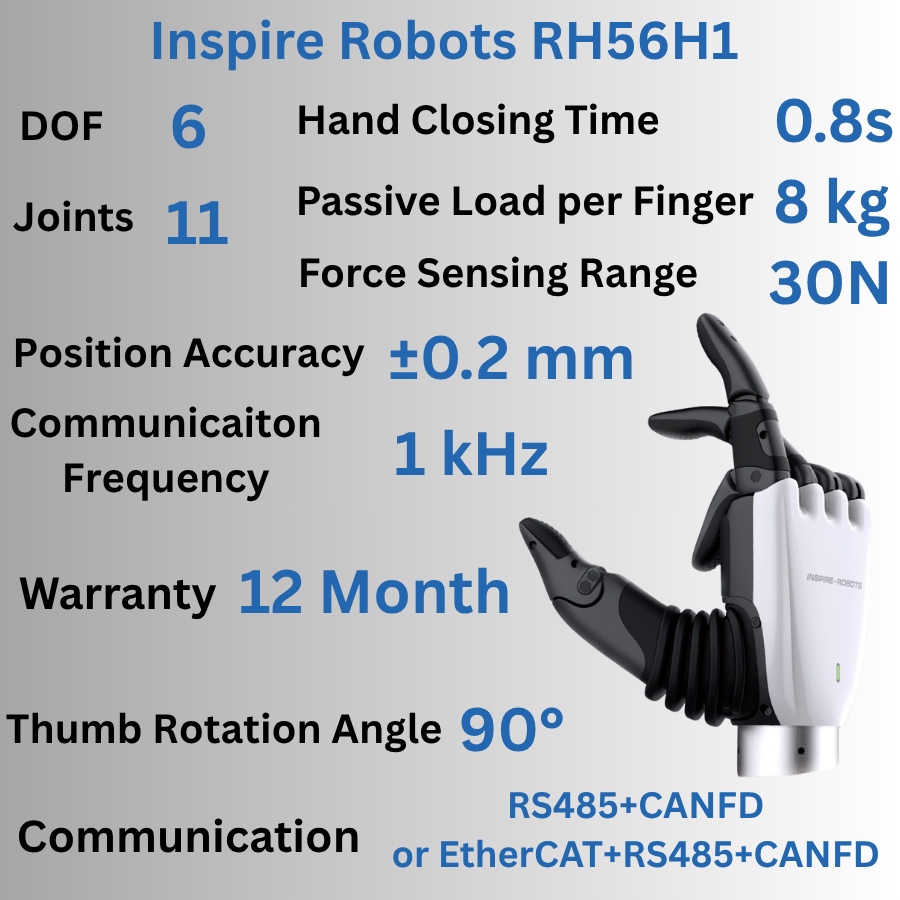
| Model | RH56BFX | RH56DFX | RH56E2 | RH56F1 | RH5DG2 | RH56H1 |
| Control interface | RS485/CAN | RS485/CAN | RS485/CAN/ModbusTCP | EtherCAT+RS485 EtherCAT+CAN FD |
EtherCAT+RS485 EtherCAT+CAN FD |
RS485+CANFD or EtherCAT+RS485+CANFD |
| Degrees of freedom | 6 | 6 | 6 | 6 | 13 | 6 |
| Numbers of joints | 12 | 12 | 12 | 12 | 18 | 11 |
| Weight | 540g | 540g | 790g±10g | 620±10g | 990±10g | 470 ± 10 g |
| Operating voltage | DC24V±10% | DC24V±10% | 24V±10% | 24V~48V | 14V~48V | 24V – 48V |
| Quiescent current | 0.09A | 0.09A | 0.25A | RS485: 194±10mA (24V) EtherCAT: 210±10mA (24V) |
290±20mA (24V) | 160 ± 20 mA |
| Peak current | 2A | 2A | 4A | 5A @24V | 7.5A @24V | 5A @ 24V/td> |
| Repeatability | ±0.20mm | ±0.20mm | ±0.20mm | ±0.2mm | ±0.2mm | ±0.2 mm/td> |
| Thumb Fingertip Strength | 6N | 15N | 30N | ≥15N | ≥20N | ≥ 15 N |
| Fingertip Strength | 4N | 10N | 28N | ≥10N | ≥10N | ≥ 10 N |
| Force resolution | 0.50N | 0.50N | ±0.05N | 0.1N | 0.1N | / |
| Lateral rotation range of thumb | >65° | >65° | 75°-170° | 60-180° | 60°-170° | 75° – 165° |
| Lateral rotation speed of thumb | 235°/s | 107°/s | >130°/s | >155°/s | 165°/s | / |
| Flexion speed of thumb | 150°/s | 70°/s | >130°/s | >37°/s | 155°/s | / |
| Flexion speed of four finger | 570°/s | 260°/s | >200°/s | >107°/s | 175°/s | / |
| Index/Middle finger lateral swing | / | / | / | / | ±15° | / |
| Maximum pressure on fingertip | 8kg | 8kg | 8kg | 8kg | 8kg | / |
| Range of tactile sensor | / | / | 0-30N | 30N | 30N | / |
| Tactile sensor accuracy | / | / | ≤5%FS | 5%FS | 5%FS | / |
| Number of tactile sensors | / | / | 5/17 | 8 | 8 | 170 (34/finger) |
| Hand closing time | 0.4S | 0.8S | 0.8S | ≤0.8s | ≤0.8s | ≤0.8s |